Technology
Cooperative Intelligent Transport Systems (C-ITS) are based on direct cooperation between objects in the road domain, either from vehicle to vehicle (V2V) or between vehicle and infrastructure (V2I). This cooperation can take place via a direct short-range connection in ITS-G5 or via a long-range or cellular connection.
A modular ecosystem has been developed to ensure that these communication technologies complement each other and can be adapted to the different situations and needs of operators.
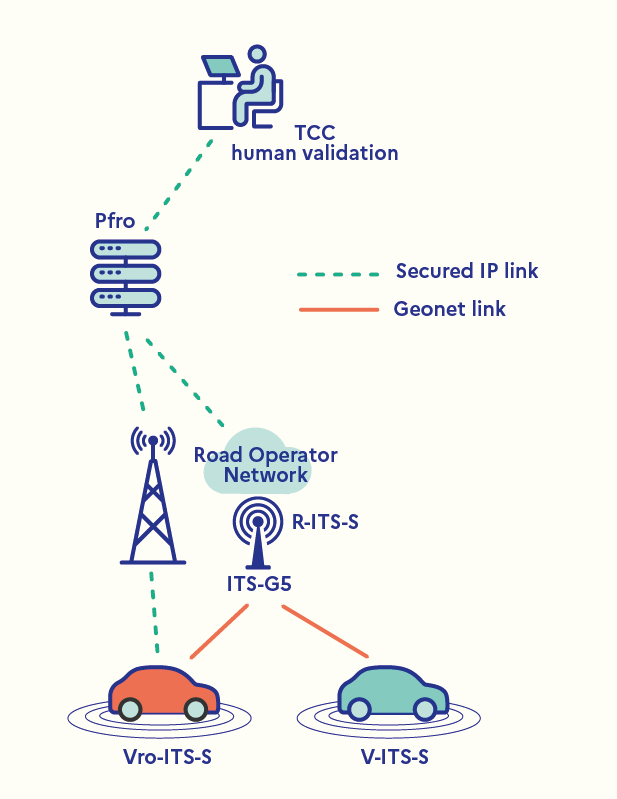
ITS-G5:
- ITS-G5 is a wireless communication technology specifically designed for cooperative intelligent transport systems (C-ITS). It is a European standard based on WiFi, also known as IEEE 802.11p.
- The technology is designed to provide low-latency communications over a short range, up to 1000 metres, and has a dedicated 5.9 GHz frequency band reserved for road safety and traffic efficiency applications.
- The data transmitted are signed C-ITS messages, to guarantee data integrity and authenticity.
- In this architecture, the information is sent by the operator (SAGT) in DATEX II to the PFro. The Pfro transmits them in CITS DATEX to the RSUs, which convert these data into C-ITS messages on the ITS-G5 link
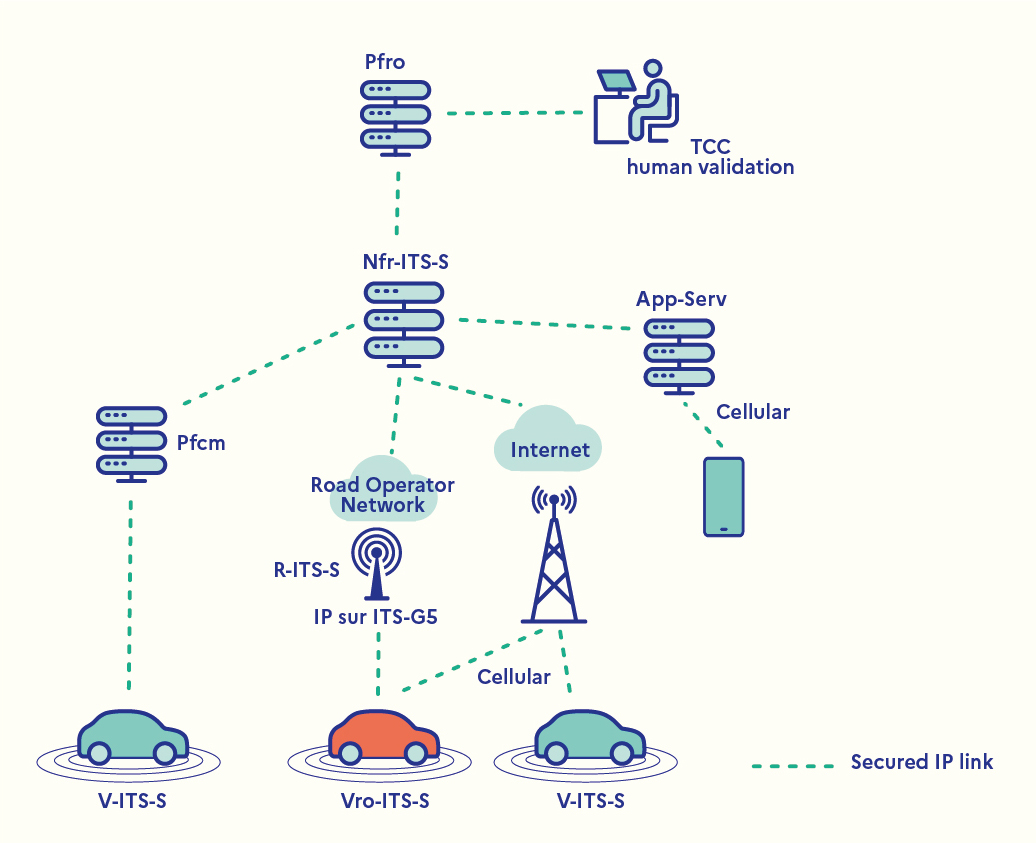
Cellular:
- Cellular is used when the vehicle has no ITS-G5 equipment or no RSU. This technology provides a point-to-point connection.
- The data are transmitted via the National Node to clients authorised to connect: Smartphone application servers, vehicle manufacturers' platforms, live connected vehicles, etc.
- In this architecture, the information is sent by the operator (SAGT) in DATEX II to the PFro. The Pfro transmits it in C-ITS DATEX to the NFr (French National Node), which converts it into a signed C-ITS message to guarantee the integrity and authenticity of the data.
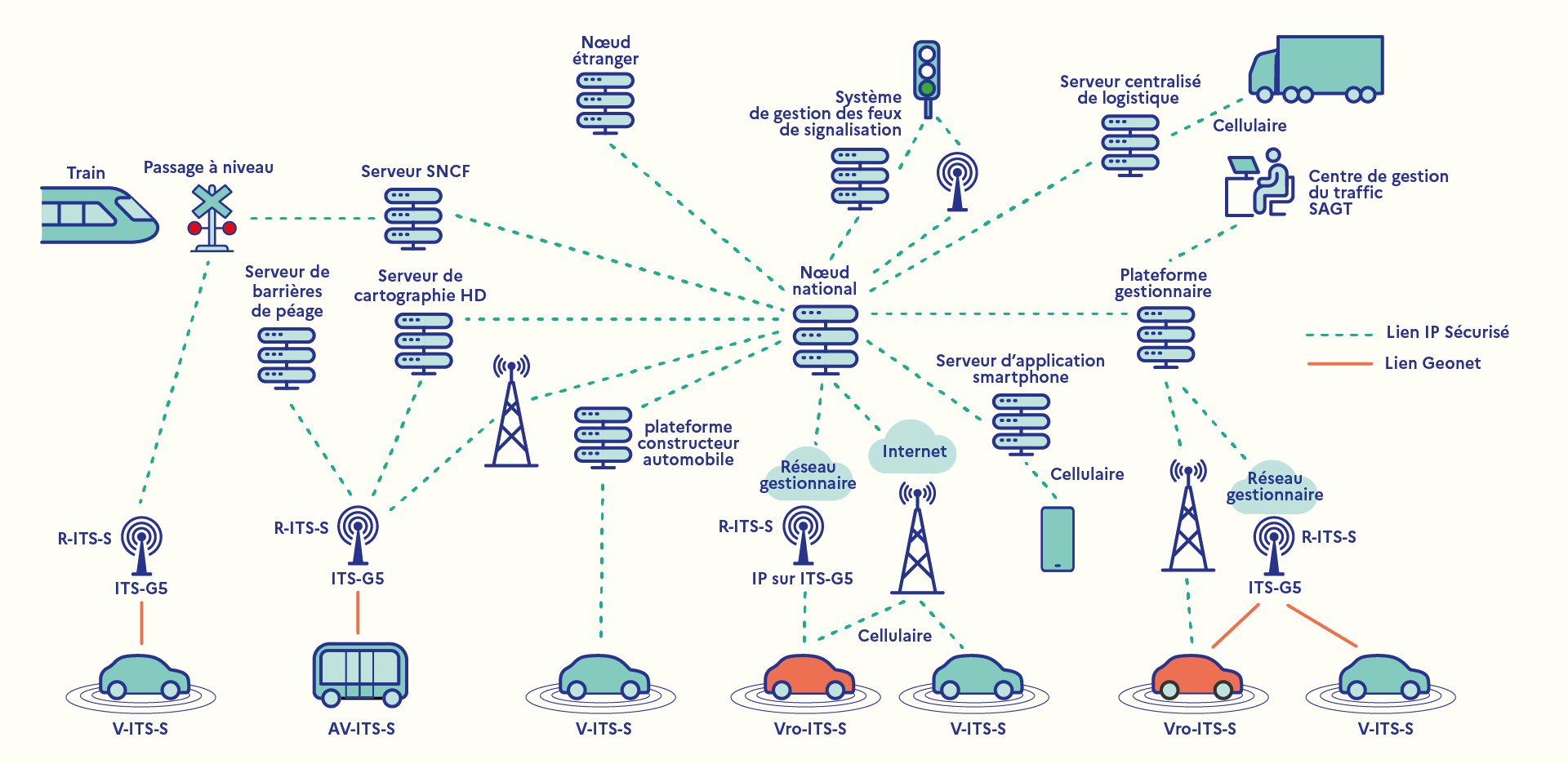
Complete architecture:
- To provide a complete service, other servers can be connected to the National Node: the SNCF server can transmit the status of connected level crossings; traffic signal intersection management systems can transmit the topologies of intersections and the status of the associated traffic signals; toll barrier systems can make it easier for automated vehicles to pass through toll barriers by providing information on the topologies and status of lanes, and can even process payment transactions; logistics servers can also be connected to the system to optimise the fleets of goods vehicles.
- In these architectures, the information can be in specific formats and is transmitted to the National Node in C-ITS DATEX or as a C-ITS message directly via a secure Internet link.
The components of the C-ITS ecosystem are all the physical elements that enable users to produce or exchange the messages required to implement the use cases.
- The TMS (or OSS) is the computerised Traffic Management Support System or Management Terminal (MT) under the responsibility of the infrastructure operators. The data are sent or received in DATEX II.
- The TIMC is the Traffic Information and Management Centre or Traffic Engineering and Management Centre. It is a global road traffic management centre. The exact scope of this structure varies from one road operator to another.
- The central ITS station, marked ITSS-C, or SCOOP platform receives and processes the information received from the road operator's management terminal or traffic management system. It sends the information to the operator's cooperative equipment deployed in the field (road-side stations or stations in the operators' vehicles), but does not communicate directly with the users' vehicles. It processes the information received from the road-side stations and makes it available to the operator.
- The roadside stations (or units), RSU receive information from the PFro that they broadcast locally to the connected vehicles. They also receive information and requests sent by connected vehicles, which are then processed (for storage, routing or transmission) and sent to the TMS via the PFro to compile traffic information. Depending on the network, there are relay RSUs that only collect vehicle data or (in urban or complex environments) multifunction RSUs that collect vehicle data and data from surrounding equipment (traffic signals, variable message signs, etc.) or sensors (video cameras, loops, etc.).
- The Platform for Road Operators (PFro) formerly known as the SCOOP platform, acts as an intermediary between the TMS and the RSUs in the uploading and downloading of information and translates messages from the TMS to adapt them to vehicular communication. It also relays information from the TMS to the NFr.
- User On-Board Units (OBUus) are ITS stations installed in user vehicles. They are connected to a standard human-machine interface (HMI) in the vehicle or to the automated driving system in the case of automated vehicles. They are capable of broadcasting messages to other ITS stations automatically and via the driver's manual input using his MMI. They receive the information sent by the other vehicles or road-side stations, process the information for potential display to the driver via his MMI. V-ITS-S cannot communicate (send and receive messages) directly with the PFro or the NFr.
- The onboard units for operators, OBU operators (OBUo) are the ITS stations installed in the operators' vehicles, which are equipped with an additional human-machine interface (HMI). The OBUos have all the functionalities of the OBUus, plus functionalities specific to the operator ("operator" mode or "mobile RSU" function). They are therefore also capable of broadcasting messages to other ITS stations, automatically and manually via the managing operator's manual input using its HMI. They receive the information sent by the other vehicles or road-side stations, process the information for potential display to the driver via his MMI. But OBUos can also communicate (send and receive messages) directly with the PFro. They fulfil the function of a "mobile RSU", which refers to the transmission to the platform of event messages sent by user vehicles or created by the OBUo itself, in the same way as RSUs. On the other hand, the mobile RSU function does not send traffic information from the consolidation processing in the first version of the operator OBUs.
- The French national node, or NFr, Nfr-ITS-S, provides nationwide connectivity between the components of the C-ITS ecosystem: with each road operator's PFro (via its network), with vehicles connected directly by cellular service or with other equipment (traffic signals, level crossings, etc.). It also transmits data to other national nodes in Europe and feeds the smartphone application server (COOPITS).
- COOPITS and its application server is a smartphone application deployed by the Ministry nationally since April 2023. This application runs on top of the user's browser and displays C-ITS alerts and events. Users can also report events that are forwarded to the operators' TMSs. These events will only be rebroadcast to users after confirmation.
- The PKI (Public Key Infrastructure) Server is designed to secure exchanges between ITS stations by issuing them electronic certificates. The communications of cooperative ITS systems, exposed to the threat of cyber attacks, must be secure and trusted. This digital trust is ensured by the PKI system used to guarantee the integrity and authenticity of the messages exchanged. In order to make data exchanges confidential and untraceable, the certificates distributed by the PKI system to ITS stations are anonymous and renewed very frequently. In practice, ITS stations obtain a pool of time-limited "pseudonymous" certificates with defined rights from the PKI. This PKI system complies with ETSI's ITS communications security standards. It is hosted and operated in a secure data centre in accordance with the practices of an electronic certification services operator.
- ToMS is the toll barrier management system. The data transmitted includes all the data required by an automated vehicle to pass through the toll barrier (lane status, means of payment, payment).
- The traffic signal intersection management system relays to the RSU and NFr all the data relating to intersections: topology, status, duration. It can also modify the timing of traffic signals in response to requests from priority vehicles.
- On-board units for automated vehicles (OBUav) are ITS stations installed in automated vehicles. These vehicles can be shuttles or prototype automated vehicles used to test the use cases of crossing work zones, toll barriers or traffic signal intersections.
- The SNCF server transmits the status of level crossings connected to the cellular link via a connection to the NFr.
- The MAP server distributes topology data, especially for toll barriers.
- The logistics server optimises the transport of goods to logistics platforms (estimated time of arrival, dock reservation, port guidance, etc.).
- The manufacturer platform receives information from the NFr and transmits it to the manufacturer's fleet of vehicles
Figure below: functional architecture of French C-ITS projects.
Messages are the units of data exchanged between the various elements of the C-ITS system, such as the vehicles, the infrastructure and its equipment, the control centres, etc. They take several forms depending on their medium and the type of message delivered. These messages are subject to various standards that provide guidelines on their format, content, transmission, data fields to be included, etc., The aim is to ensure interoperability between systems and equipment, especially across Europe.
Two types of message are sent:
- transmitted messages that are intended to be broadcast in a relevant geographic zone and that do not identify the recipients in advance (every ITS station travelling in the geographic zone is likely to be a recipient of the message). This is the broadcast mode that can be assigned to a precise or undefined geographic zone. Cooperative messages between vehicles and CAM and DENM infrastructure fall into this category.
- transmitted messages sent to a pre-identified recipient. This is the "unicast" (point-to-point) mode. This mode is mostly carried out using a protocol other than the G5 ITS protocol.
The examples below are the main types of messages exchanged by French C-ITS systems:
CAM (Cooperative Awareness Message):
- CAMs allow vehicles and infrastructure to share basic information about their status and position. This can include data such as speed, direction, acceleration, etc.
DENM (Decentralized Environmental Notification Message) :
- These messages provide real-time information about the road environment to nearby vehicles and infrastructure. The information can include alerts on weather conditions, road works, accidents, etc.
SPaTEM (Signal Phase and Timing Message) :
- These messages provide information on the current status of the traffic signals, including the current phase (green, yellow, red) and the time remaining for each phase. This helps vehicles to adjust their speed to optimise traffic flow and improve safety.
MAPEM (Message Access Profile Message) :
- MAP messages describe the topology of the road network, including information on lanes, intersections, speed limits, traffic signs, etc. This data enables vehicles to plan their routes more efficiently and safely.
IVIM (In-Vehicle Information Message) :
- IVIM messages provide real-time information to in-vehicle drivers. This can include alerts on traffic conditions, road works, accidents, weather conditions, alternative routes, etc.
POIM (Point Of Interest Message) :
- POIM messages transmit information about specific points of interest along a route. This can include details about petrol stations, restaurants, tourist attractions, rest areas, electric vehicle charging stations, etc.
SSEM (Service-Specific Extension Message) :
- SSEM messages are extensions to existing C-ITS messages. They allow additional information or functionality to be added and can be used to tailor C-ITS services to the specific needs of an application or service provider.
SREM (Safety-Related Extension Message) :
- SSEM messages are also extensions to existing C-ITS messages. They can be used to include safety-related information, such as warnings about danger zones, temporary speed limits, safe driving advice, etc.
CPM (Collective Perception Message) :
- CPM messages are messages originating from a sensor in the field. Depending on the nature and location of the sensor, they can provide information about obstacles on the roadway, pedestrians near public transport stops and vehicles entering the roadway. The information in these messages includes the type of obstacle, its location, speed and direction. This information is then displayed to the driver.
The following document presents the list of validated and published standards used in French C-ITS projects «2.4.1_M_bis List of standards». These standards are classified as follows:
- ITS-G5 access layer standards;
- Transport and network layer standards;
- “Equipment” layer standards
- “Application” layer standards
- Safety standards
- Mapping
- DATEX II standards
- Standards for compliance and interoperability testing
- Standards for hybrid communications